
Researchers unveil live reinforcement learning-based whole-body humanoid teleoperation system, promising significant advancements.
The Carnegie Mellon University team’s teleoperation system is based on reinforcement learning and features scalable retargeting and training facilitated by vast human motion datasets.
Owing to their physical resemblance to people, humanoid robots offer a unique potential for real-time teleoperation. The team aimed to use an RGB camera to translate human gestures into humanoid behaviors in real time. Additionally, this technology may make it possible to collect extensive and high-quality human operation data for robots, where imitation learning can be applied to human-teleoperated tasks.
A viable substitute is offered by recent developments in reinforcement learning for humanoid control. Firstly, reinforcement learning has been applied in the graphics community to produce intricate human movements, carry out various tasks, and follow real-time human motions recorded by a webcam in simulation.
Utilizing a comprehensive full-body motion imitator akin to the perpetual humanoid controller , the team proposes to train and seamlessly transition to real-world deployment with zero-shot learning.empowers it to achieve real-time teleoperation of humanoid robots through a human operator and a simple webcam interface.
France Dernières Nouvelles, France Actualités
Similar News:Vous pouvez également lire des articles d'actualité similaires à celui-ci que nous avons collectés auprès d'autres sources d'information.
 China plans robot-builder to construct a human base using Moon bricksInteresting Engineering is a cutting edge, leading community designed for all lovers of engineering, technology and science.
China plans robot-builder to construct a human base using Moon bricksInteresting Engineering is a cutting edge, leading community designed for all lovers of engineering, technology and science.
Lire la suite »
 One simple ChatGPT hack makes AI responses sound like a human instead of a robotA ChatGPT prompt hack lets you tweak the chatbot's reply tone to make it sound more like a human rather than a robot.
One simple ChatGPT hack makes AI responses sound like a human instead of a robotA ChatGPT prompt hack lets you tweak the chatbot's reply tone to make it sound more like a human rather than a robot.
Lire la suite »
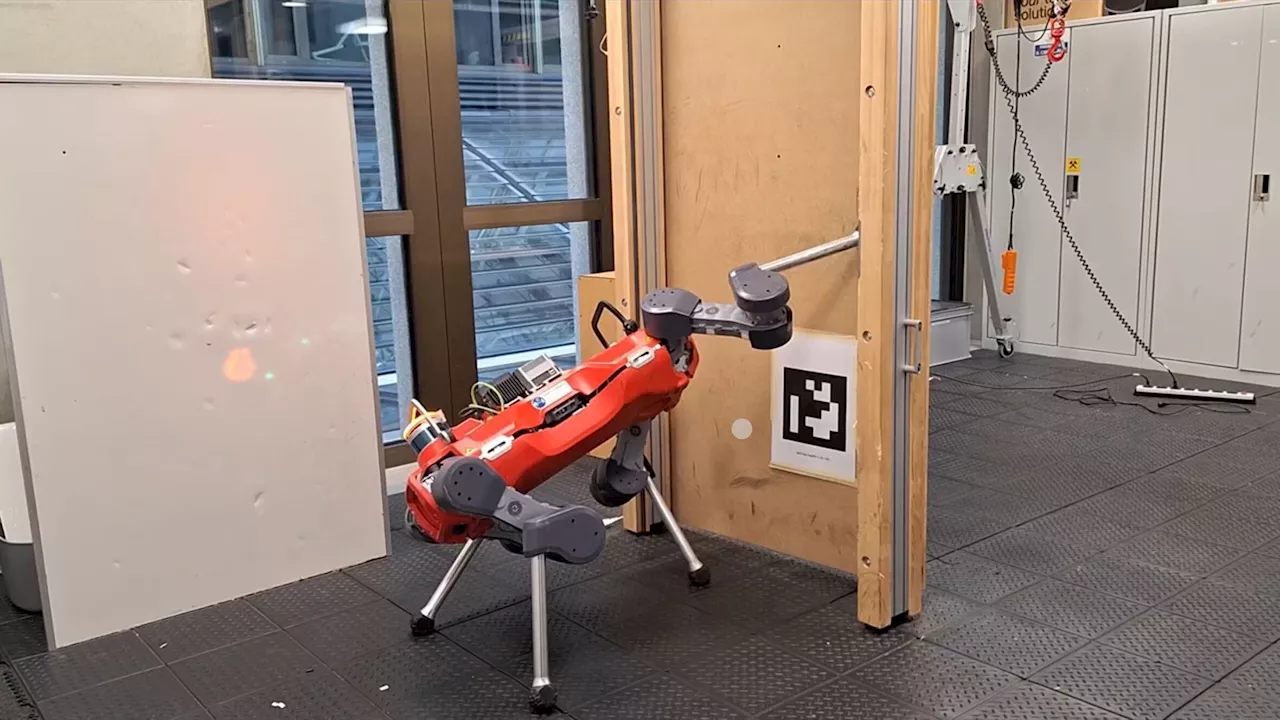 Researchers taught a robot dog to open a door with its legMack DeGeurin is a tech reporter who’s spent years investigating where technology and politics collide. His work has previously appeared in Gizmodo, Insider, New York Magazine, and Vice.
Researchers taught a robot dog to open a door with its legMack DeGeurin is a tech reporter who’s spent years investigating where technology and politics collide. His work has previously appeared in Gizmodo, Insider, New York Magazine, and Vice.
Lire la suite »
Strasbourg-Ville, Bas-Rhin (FR) job with HUMAN FRONTIER SCIENCE PROGRAM ORGANIZATIONABOUT US The Human Frontier Science Program Organization (HFSPO) is a unique organization, supporting international collaboration to undertake innovative, risky, basic research at the frontier of the life sciences. It is supported financially by 16 countries and the European Commission.
Lire la suite »
Washing, Sterilisation and Media Preparation Technician - Milan (IT) job with Human TechnopoleAPPLICATION CLOSING DATE: March 7th, 2024 About Human Technopole: Human Technopole (HT) is an interdisciplinary life science research institute, created and supported by the Italian government, with the aim of developing innovative strategies to improve human health.
Lire la suite »
 Human smuggling operation busted: Three caught, eight rescuedSAN ANTONIO -The Bexar County Sheriff's Office will provide details regarding a Southwest side human smuggling operation | LIVEThis is a developing story.WATCH
Human smuggling operation busted: Three caught, eight rescuedSAN ANTONIO -The Bexar County Sheriff's Office will provide details regarding a Southwest side human smuggling operation | LIVEThis is a developing story.WATCH
Lire la suite »